
- Intuitive Visual Matrices Table of Contents TOC
- Math: Area of a Parallelogram equals geometric mean of triangles
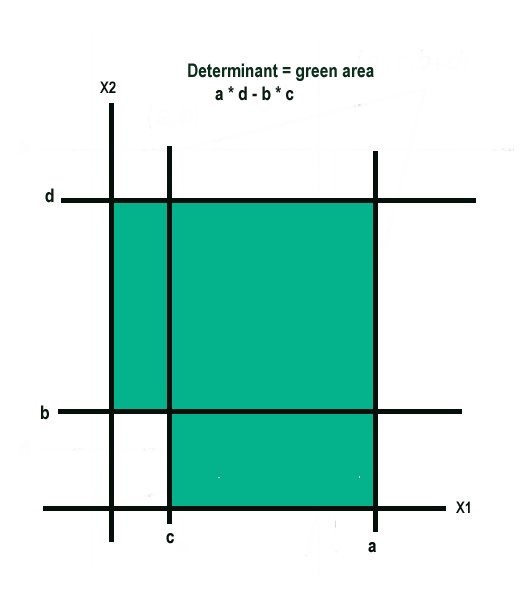
- Math: Derivation of Matrix Determinant
- Two 2 dimensional determinant of a matrix animation showing it is equal to the area of the parallelogram
- Interpretation of Matrix determinant as hyper-volume
- Intuitive Matrix Inverse
- Solution of similtaneous linear equations
- Matrices, Eigenvalues, Eigenvectors
End of TOC

")
It is easy to see in the case of a brick that the volume = det(A) = 2 * 3 * 4
Assuming that the b vector is equal in the  dimension and conveniently using the same values as the system matrix:
dimension and conveniently using the same values as the system matrix:
(matrix{3}{1}{X_1 X_2 X_3 }) = (matrix{3}{1}{2 3 4 })")
Using the results of the Cramers rule page:
 (matrix{1}{3}{{A_11}^c {A_21}^c {A_31}^c})}/{det(A)}")
(12 , 0 , 0)}/{24} =1")
Taking a closer look at this dot product you can see that the only part of the b vector that is important is the dimension. The zeros in the cofactor vector make the other components irrelevant. This solution can be interpreted as dimension being the number of “brick” volume units that b sweeps out with the cofactor represented hyper-area. The dimension solution of 1 says that 1 brick volume unit is swept out. That is easy to confirm in this case as volume with  dimension against the area of 3 X 4 is 24.
dimension against the area of 3 X 4 is 24.
Matrices with nonzero off diagonal elements
The 2 dimensional determinant of a matrix can be interpreted as the area of a parallelogram as shown in the following diagram.

The parallelogram above corresponds to the following matrix
")
With determinant
 …. the following describes and summarizes the result
…. the following describes and summarizes the result
Wow! We must be deep in the direction cosines without even noticing! Let us try another point of view.

The area of the parallellogram = Base x Height. We could project the B vector onto a unit vector orthogonal to the base. Or better yet we could project the B vector onto a vector of the same magnitude as the A vector that is orthogonal to A. Well that is easy. Just form that vector by spinning the A vector 90 degrees. The result is < Ay , -Ax >. Now you can calculate the project of B on this orthogonal vector by forming the dot product. That is: < Bx, By > * < Ay, -Ax> = BxAy – ByAx which of course looks like the determinant of a matrix because it is! It corresponds to the following matrix:
")
This carries on through higher dimensions. Below depicts a 3 variable system.

The rows r1, r2, r3 are vectors each. The various summations taken 1, 2 and 3 at a time define a parallelepiped.
The following excerpt is from X and may yield some insight when maximum entropy principle is applied. ( still working on this )

From Wikipedia: Determinant See also: Leibniz formula for the permutation approach
The Leibniz formula for the determinant of a 3 × 3 matrix is the following: Here we see where the sign flipping comes from.

With the rotation through the values standardized using Sarrus Rule

Leibniz Formula Derivation links
- Wiki: Leibniz formula for determinants
- YT: Linear Algebra 46 | Leibniz Formula for Determinants [dark version]
Directed Volume
Both of the following matrices have unit vectors on x y z axis. Only the order is different and this results in a sign change. A bit mysterious.
 = 1")
 = -1")
0 Comments